无刷直流电机既具有交流电机结构相对比较简单、运行可靠、维护方便等优点,又具有直流电机运行效率高、无励磁损耗、调速性能好的特性,因此在各行业中的应用日益广泛。无刷直流电机是一种特殊的永磁同步电机,传统的无刷直流电机大多数采用位置传感器确定转子位置,并据此控制驱动换相。由于位置传感器的存在,增加了电机体积和成本,降低了电机可靠性,限制了某一些场合的应用。
本文给出一种基于反电动势过零点检测法控制无刷直流电机的实现方法,该方法所需硬件简单。软件功能强大。
无刷直流电机由电机本体、转子位置和电子3部分所组成。其示意图如图1所示。
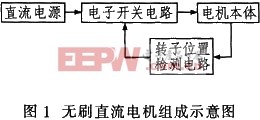
电子开关电路最大的作用是控制电机本体定子各相绕组的通电顺序和时间,主要由功率管、驱动电路以及转子位置信号处理模块构成。转子位置检测电路最大的作用是实时检测转子位置,为换相提供相关依据。电机本体由定子线圈绕组与永磁转子构成。电机本体结构如图2所示。

有刷直流电机通过电刷实现转子绕组的换相,产生旋转磁场,且定子磁场与转子磁场方向垂直,从而使转子旋转。无刷直流电机工作过程与此类似,不同之处在于通过电子开关电路控制定子换相,使定子绕组产生旋转磁场,使得永磁转子旋转。由此可见,无刷直流电机中,转子位置很重要,否则不能准确控制换相时间,导致电机不能输出最大转矩,甚至不能运转。
要实现无位置传感器无刷直流电机的控制,核心问题是如何获得转子的位置信息。由于永磁转子旋转产生旋转的磁场,定子绕组切割该磁场,感应出电动势,该电动势就是反电动势。反电动势过零点检测法是一种常用的方法,由无刷直流电机结构可知,反电动势过零点与转子位置有对应关系,通过对定子绕组上反电动势的检测得到过零点,就能够获得转子位置信息,由此控制换相。
以三相Y型连接,两两导通为例说明反电动势与换相的关系以及反电动势检测的新方法。电机主回路电路如图3所示。
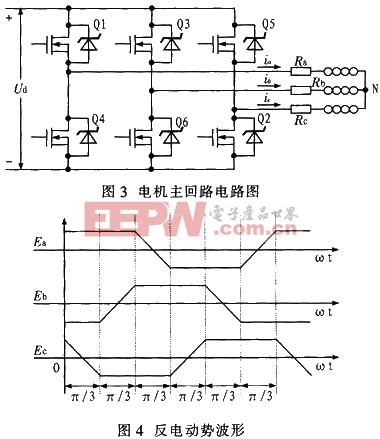
转子以ω角速度运转时,各相产生的反电动势波形如图4所示,Ea、Eb、Ec分别为a、b、c相的反电动势。
当某一相的反电动势出现过零点后,再延迟30°电角度就是换相时刻。因此只要能检测到反电动势的过零点,根据当时的转速,延时转子转过30°的时间,控制图3中Q1至Q6的通断,就可实现换相。
实际中,电机反电动势不能直接检测,只能间接获取。由电机三相端电压平衡方程可以推导出在反电动势过零点附近有:
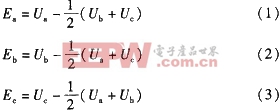
通过检测相电压,再根据式(1)、(2)、(3)很容易得到反电动势过零点,再延时30°电角度换相,就可以使励磁与转子同步。
采用Microchip公司的dsPIC30F3010微控制器实现无刷直流电机的控制。dsPIC30F3010具有6路10位A/D、专对于电机设计的6路PWM模块、5路16位定时器、24 KB Flash程序存储器以及1 KBRAM。其硬件电路图如图5所示。
用AN2、AN3、AN4实现电机端电压检测,得到反电动势过零点。采用PWM模块控制6个MOS-FET通断,就可实现换相。采用不一样的占空比就可实现对电机调速。
通过对阻值为0.1Ω的电阻端电压的检测获取过流、过载信息,根据电机的真实的情况调整放大倍数和比较器的参考电压。
因电机反电动势通常比5 V高,故一定要通过电阻分压后才能进行A/D转换,分压电阻根据电机母线电压不同取不同值,只要能保证分压后的电压在微控制器的允许范围内即可。
3相逆变桥由6个MOSFET构成,本系统模块设计采用IR2407,它可承受600 V电压,电流达49 A。PWM驱动器由3片IR2110构成。
由于dsPIC30F3010为28引脚器件,I/O口有限,不能设计人机接口,因此,需采用RS-232接口与PC机连接,通过超级终端软件实现人机对线 系统软件设计
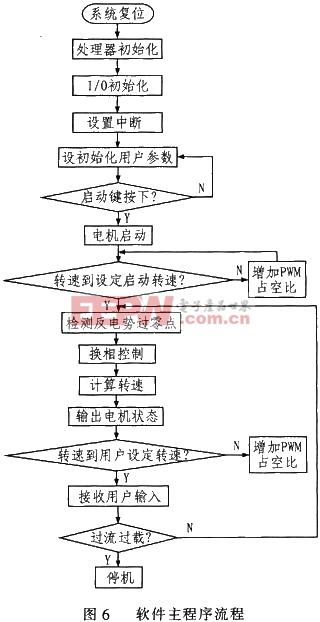
软件由初始化模块、启动模块及无传感器运行模块构成。因电机启动时转速很低,反电动势很小,故反电动势过零点检测法失效。只能用开环控制电机,当电机达到一定转速后切换到闭环控制,采用反电动势过零点检测法检测转子位置,所以启动模块是必须的。软件主程序流程如图6所示。
在反电动势过零点检测模块中,对经电阻分压后的端电压进行A/D转换,再根据式(1)、(2)、(3)计算各相反电动势,如果某相的反电动势为零,则该时刻对应着该相反电动势过零点。如果三个值都不为零,则说明换相时刻还没有到来,不需要换相。这就要求对端电压分压的电阻必须对称,以减小误差,且A/D转换频率应该与电机转速相匹配。
实验证明,该无刷直流电机硬件结构相对比较简单、可控性好。低速启动时,电机性能不如有传感器无刷直流电机,但启动后性能与有传感器相当。无传感器无刷直流电机可在恶劣的工作环境下工作,受干扰比较小,可靠性高,成本低,具有较广阔的未来市场发展的潜力。
版权所有:亚洲雷火官网入口-雷火官方网站上 粤ICP备20005664号
友情链接:雷火官网入口
亚洲雷火官网
雷火官方网站上