来驱动步进电机,实现对电机转动角度、速度和方向的精确控制。步进电机控制器通常包括一个脉冲信号发生器、一个和一个控制板。脉冲信号发生器负责产生脉冲信号,驱动器则将脉冲信号转换为步进电机所需的强
脉冲信号产生:步进电机控制器中的脉冲信号发生器根据预设的参数(如脉冲频率、脉冲数等)产生脉冲信号。这些脉冲信号是控制步进电机转动的关键。
信号传输与放大:产生的脉冲信号通过驱动器进行传输和放大。驱动器将微弱的脉冲信号转换为步进电机所需的强电流信号,以满足电机工作的需要。
步进电机驱动:放大后的强电流信号进入步进电机驱动器,驱动步进电机按照预设的参数进行转动。步进电机驱动器经过控制绕组的通电顺序和通电时间,实现电机转子的精确转动。
反馈与调整:步进电机控制器还具备反馈功能,可以实时监测电机的运作时的状态并作出调整。通过反馈电路,控制器能获取电机的实际位置、速度等信息,并与预设值作比较。如有偏差,控制器会调整脉冲信号的参数,以实现对电机转动的精确控制。
精确控制:步进电机控制器能够精确控制步进电机的转动角度、速度和方向。通过调整脉冲信号的参数,能轻松实现电机转子的精确转动,满足各种复杂工况下的控制需求。
自动化操作:步进电机控制器能轻松实现自动化操作,降低人工干预的需求。在工业自动化生产线中,步进电机控制器能够准确的通过预设的程序自动调整电机的运作时的状态,实现生产的全部过程的自动化和智能化。
提高效率与精度:步进电机控制器可以优化电机的运作时的状态,提高生产效率和精度。通过精确控制电机的转动角度和速度,能够大大减少不必要的能耗和磨损,提高设备的稳定性和使用寿命。
广泛适用:步进电机控制器具有广泛的适用性,能应用于各种需要精确控制的场合。例如,在精密机械控制、机器人技术、医疗设施等领域,步进电机控制器都发挥着重要的作用。
步进电机控制器作为工业自动化和精密机械控制中的关键设备,其性能的稳定性和控制的精确性对于总系统的运行至关重要。随技术的持续不断的发展,步进电机控制器的种类也日益丰富,每种类型都有其独特的特点和适用场景。
数字式步进电机控制器主要利用计算机的数据处理能力,通过内部的微处理器DSP)对步进电机的运作时的状态进行精确控制。这类控制器具有高度的灵活性和可扩展性,能够最终靠编程实现复杂的控制算法和逻辑。数字式步进电机控制器通常具有高精度、高速度、低噪音和低振动等特点,适用于需要高精度定位和控制的场合。
模拟式步进电机控制器一般会用模拟电路来控制步进电机的转动。这类控制器通过调整输入到步进电机的电压、电流、相位等参数来控制电机的转动速度和位置。模拟式步进电机控制器具有响应速度快、控制简单等特点,适用于对控制精度要求不高的场合。
环路步进电机控制器是一种基于硬件电路的控制器,其内部包含了一个环路算法,可以智能化、自动化地控制步进电机的运作时的状态。这类控制器通常具有可靠性高、设计简单等特点,适用于对控制精度和稳定能力要求比较高的场合。
PLC作为一种通用的工业自动化控制设备,也能够适用于步进电机的控制。PLC具有多通道高速脉冲输出口,可以同时控制多台步进电机。由于PLC功能全面,步进电机控制只是其众多功能之一。
以STM3251单片机为代表的单片机芯片也可当作步进电机控制器使用。这类控制器通常具有高速单脉冲输出口,能轻松实现精确的步进电机控制。但单片机芯片的开发设计较为复杂,需要一定的编程经验。
驱控一体式步进电机控制器将驱动功能和控制功能集成在一起,无需外接驱动器。这类控制器有着非常丰富的IO接口,可以连接步进电机编码器、电动机限位开关等设备。驱控一体式控制器通常具有操作简单便捷、可靠性高等特点。
步进电机控制器作为工业自动化和精密机械控制中的关键设备,其种类非常之多、特点各异。在选择步进电机控制器时,应该要依据具体的应用场景和需求来选择正真适合的类型。无论是数字式、模拟式还是环路式控制器,以及PLC、单片机和驱控一体式控制器,都有其独特的优点和适用场景。通过进一步探索各种步进电机控制器的特点和性能,能更好地满足实际应用的需求。
该项目中的第一个电路是使用 L293D实现的。由于 L293D 电机驱动器有四个输出引脚选项,因此只可以使用它驱动双极步进电机。
双极步进电机与 8051 微控制器和 L293D 电机驱动器连接的电路图如下图所示。

RST 引脚使用 10KΩ 电阻下拉。按钮和 10μF电容器的组合将用于重置微控制器。此外,EA 引脚使用 10KΩ 电阻上拉。
对于电机驱动器,两个使能引脚和两个电源引脚连接到 +5V 电源。四个输入连接到8051 的 PORT1 引脚,即 P1.0、P1.1、P1.2 和 P1.3。双极步进电机的四个引脚连接到L293D的四个输出引脚。
为了控制步进电机的方向,将三个按钮连接到 PORT3 引脚,即 P3.0、P3.1 和 P3.2。
该项目中的第二个电路是使用 8051 微控制器和 ULN2003 实现步进电机控制。由于 ULN2003晶体管阵列由 7 个输出组成,因此您能控制单极和双极步进电机。
在此项目中,我将向您展示怎么样去使用 8051 微控制器和 ULN2003 晶体管阵列控制 5 线单极步进电机。
下图显示了步进电机与 8051 微控制器和 ULN2003 连接的电路图。
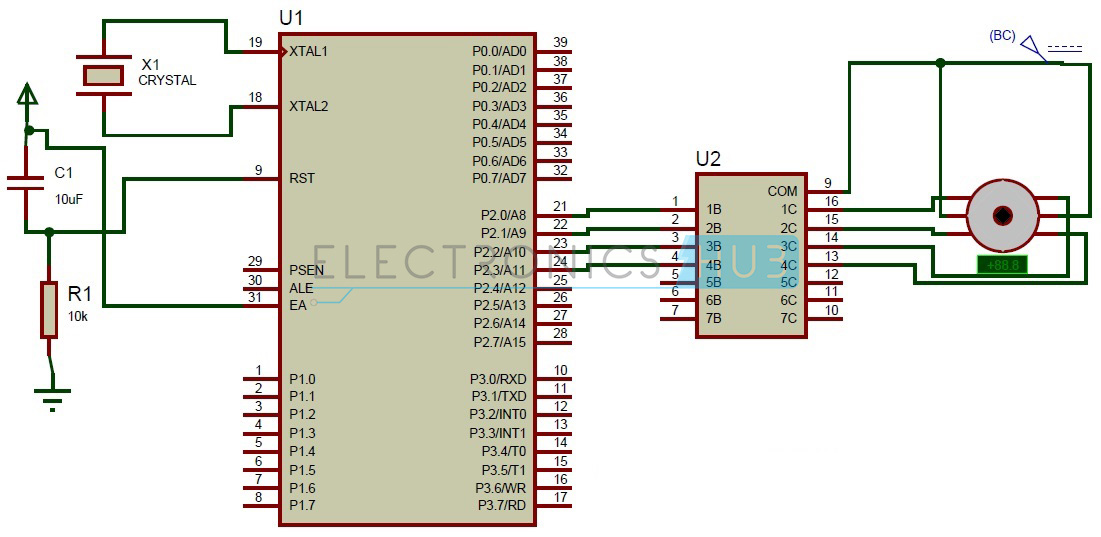
该电路由AT89C51单片机、ULN2003A、电机组成。 AT89c51 是低功耗、高性能、CMOS 8 位、8051 系列微控制器。它有 32 条可编程 I/O 线K 字节的 Flash 可编程和可擦除存储器。外部晶体振荡器连接在微控制器的 18 和 19 引脚上。电机通过驱动IC连接到微控制器的port2。
ULN2003A 是一款电流驱动器 IC。它用于驱动步进电机的电流,因为它需要超过60mA的电流。它是达林顿对的数组。它由七对具有公共发射极的达林顿阵列组成。该IC由16个引脚组成,其中7个为输入引脚,7个为输出引脚,其余为VCC和地。前四个输入引脚连接到微控制器。以同样的方式,四个输出引脚连接到步进电机。
步进电机有6个引脚。在这6个引脚中,2个引脚连接到12V电源,其余的连接到步进电机的输出。步进器以给定的步距角旋转。旋转的每一步都是完整循环的一部分。这取决于机械部件和驱动方式。
与所有电机类似,步进电机也有定子和转子。转子有永磁体,定子有线 个线 度旋转步进。这四个线圈按循环顺序激活。
步进电机是机电设施和电路中普遍的使用的电机,它具有永磁体转子,定子周围绕有磁线圈。为了控制转子的运动,他们将定子布置在转子附近以提供磁场。它还具有一个无刷同步电机,将整个旋转分为几个步骤。步长大小由转子上的齿数和相位决定。如果我们检查双面步进电机,它包含 4 相和 50 个齿,因此每转可带来 50×4=200 步,每步角度为 1.8°。现在,在本教程中,我们将学习“555定时器步进电机控制器电路”
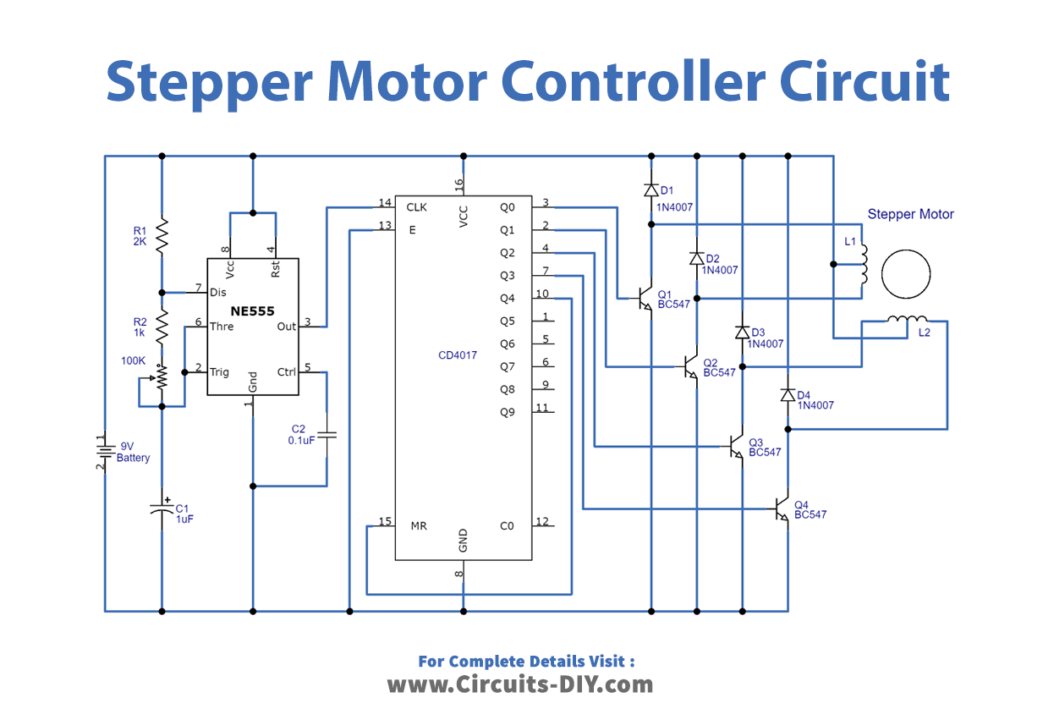
555 定时器步进电机有两个阶段。在第一级中,有一个定时器 IC,它用作非稳态多谐振荡器,并根据定时电阻器和定时电容器的值生成方波脉冲。第二级有一个十进制计数器集成电路CD4017。它对来自定时器 IC 的方波脉冲进行计数,并通过连接在电路中的四个晶体管输出引脚提供步进脉冲输出。我们通过开关晶体管向步进电机的线圈提供所有脉冲。
这是仅使用基本部件的简单步进电机控制器的电路图。驱动电路使用四个晶体管(SL100)驱动电机绕组,两个非门和一个异或门解码两位控制逻辑来驱动电机的四个绕组。二极管D1至D4保护相应的晶体管免受电机绕组切换期间产生的瞬变的影响。 d0 和 d1 是确定旋转方向和速度的控制逻辑。
该电路的控制逻辑可以从由555非稳态多谐振荡器提供时钟的2位向上/向下计数器获得。计数方向决定旋转方向,非稳态多谐振荡器的频率决定旋转速度。如上图所示,IC1a IC1b 属于同一个 IC 7404。IC1和IC2的引脚14和引脚7必须分别连接至+5V和地,尽管电路图中未示出。5V可以从基于7805的电源电路获得。使用 IC 7805 的 5V 电源。Vcc是步进电机所需的电压。它因电机而异。这里我们大家可以使用最高24V的步进电机。为了获得更高的工作电压和功率,必须将 SL100 晶体管替换为更高功率的晶体管,例如 2N3055。
版权所有:亚洲雷火官网入口-雷火官方网站上 粤ICP备20005664号
友情链接:雷火官网入口
亚洲雷火官网
雷火官方网站上